Architecture
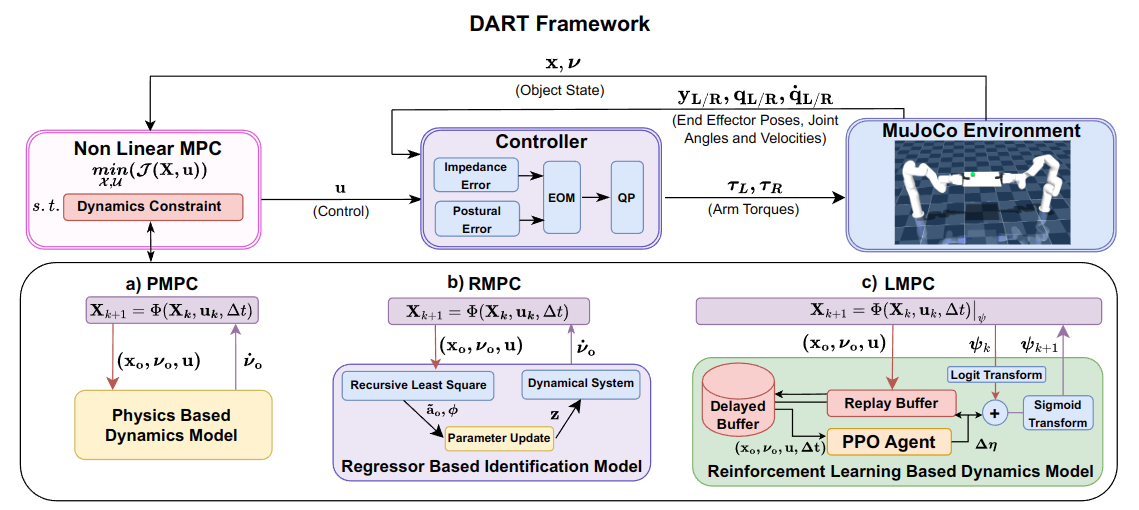
DART Framework: Our proposed framework takes the current object state
\(\mathbf{X}\) and the desired target state \(\mathbf{X}^{\text{ref}}\).
We choose \(\boldsymbol{\nu}^{\text{ref}}\) as \(0^{6 \times 1}\) as inputs.
These are fed into a nonlinear MPC, which computes the optimal tray-tilt commands
(\(\mathbf{u}\)). These commands are then passed to an optimization-based
impedance controller, which computes the torques required to realize the tilts.
Feedback from the simulator updates the object state for closing the loop for the next MPC step.
The object-tray dynamics is modeled as a state transition constraint for the MPC.
We propose three models for this state transition constraint, namely
(a) PMPC: an analytical physics-based dynamics model,
(b) RMPC: a regressor-based model which learns unmodeled dynamics, and
(c) LMPC: a PPO agent used to estimate the object dynamics.